1.概述
激光雷达 (Laser Detection And Ranging, LADAR 或 Light Detection And Ranging, LIDAR) 区别于传统的以微波和毫米波作为载波的雷达,是指以激光作为载波、以光电探测器作为接收器件、以光学镜头作为天线的光雷达。
其工作原理是向被测目标发射激光束,然后测量反射或散射信号的到达时间、强弱程度等参数,以确定目标的距离、方位、运动状态及表面光学特性,从而建立测量目标的三维成像信息。由于探测精度高、功耗低、体积小、易于装备等特点,目前激光雷达在地形测绘、城市建模、工业制造、自动驾驶,以及预警探测、制导、引信等技术中等领域已得到广泛的应用,具有良好的应用前景
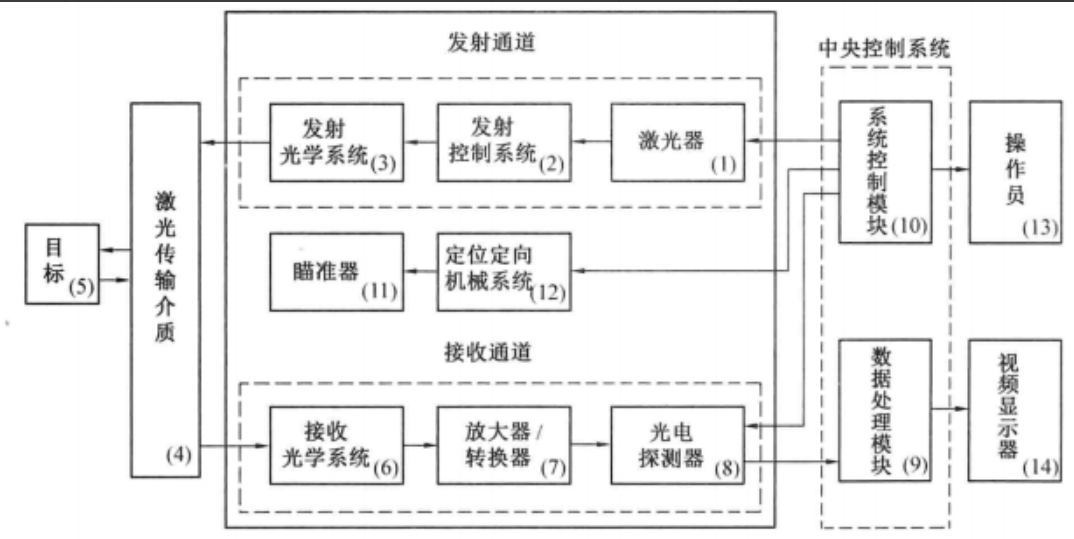
激光雷达的基本原理如下图:
2.1设计要求
为了提高激光雷达的探测范围、分辨率和精度,激光雷达接收镜头也在往大视场、大孔径方向发展。下面是一个大视场大孔径的激光雷达接收物镜的指标:
固态激光雷达探测器:像面尺寸19.5×11.5mm,像元面积35×45um
波长905+-5nm
焦距15mm
视场角 2w =76
FN =1.4
后焦26mm
总长77mm
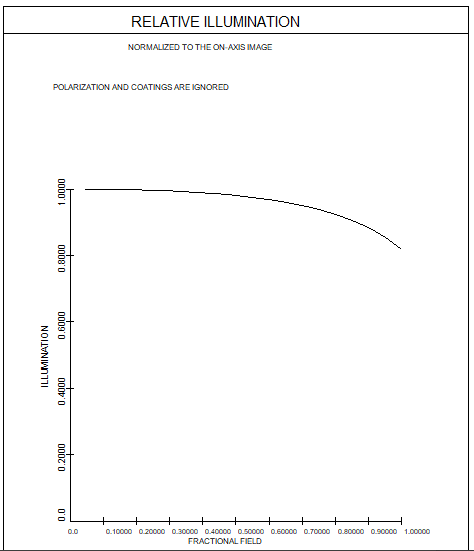
相对照度全视场>0.7且均匀
畸变<8%
MTF >0.5 全视场 20 lp/mm
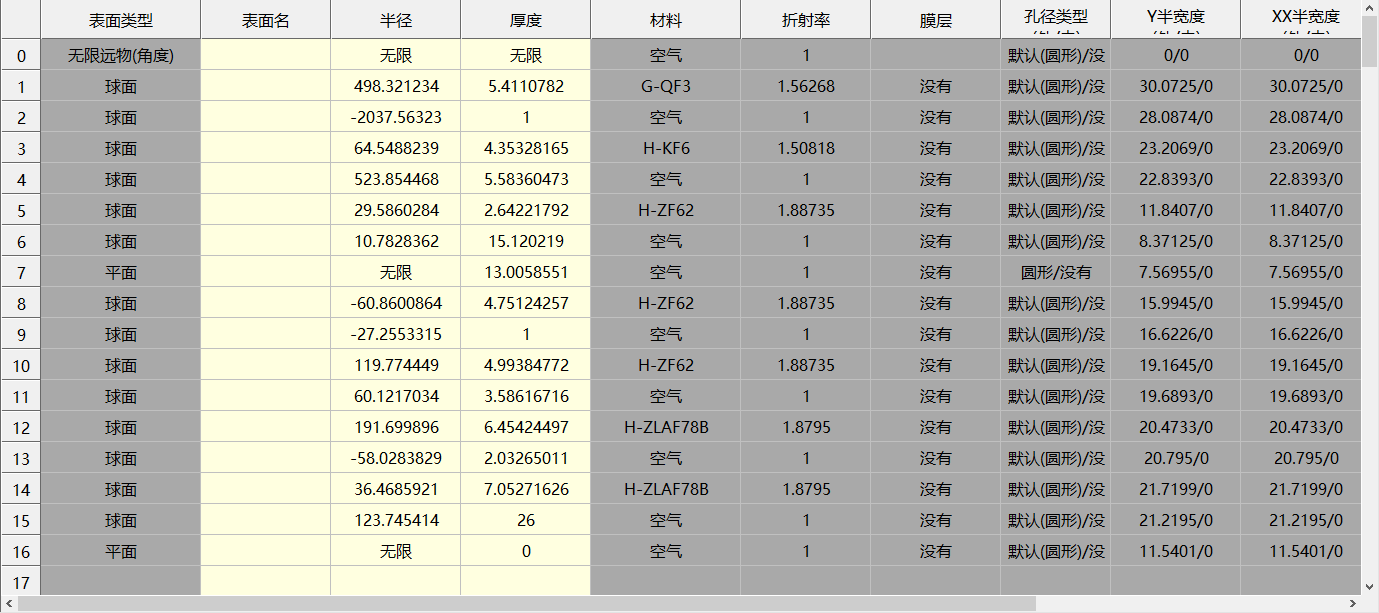
SYNOPSYS 初始结构搜索宏和运行结果:
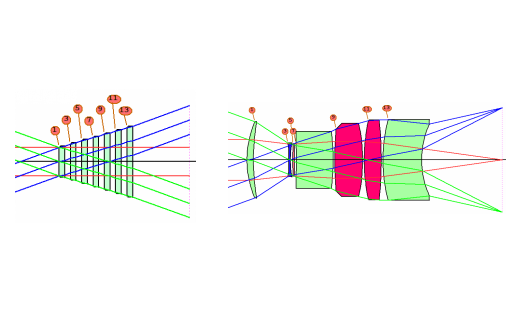
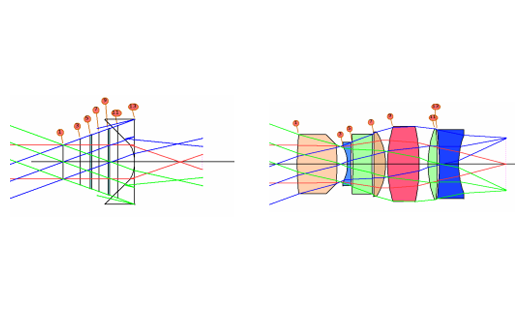
运行搜索宏可以得到10个初始结构
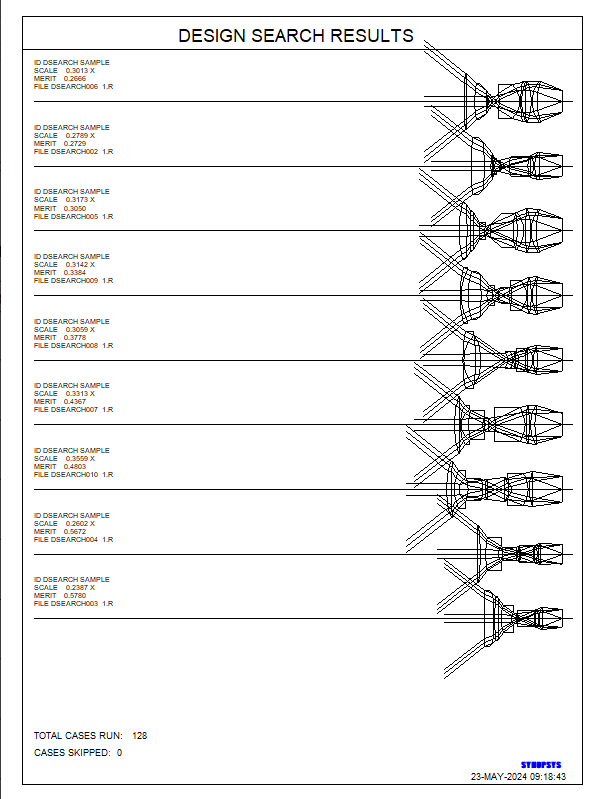
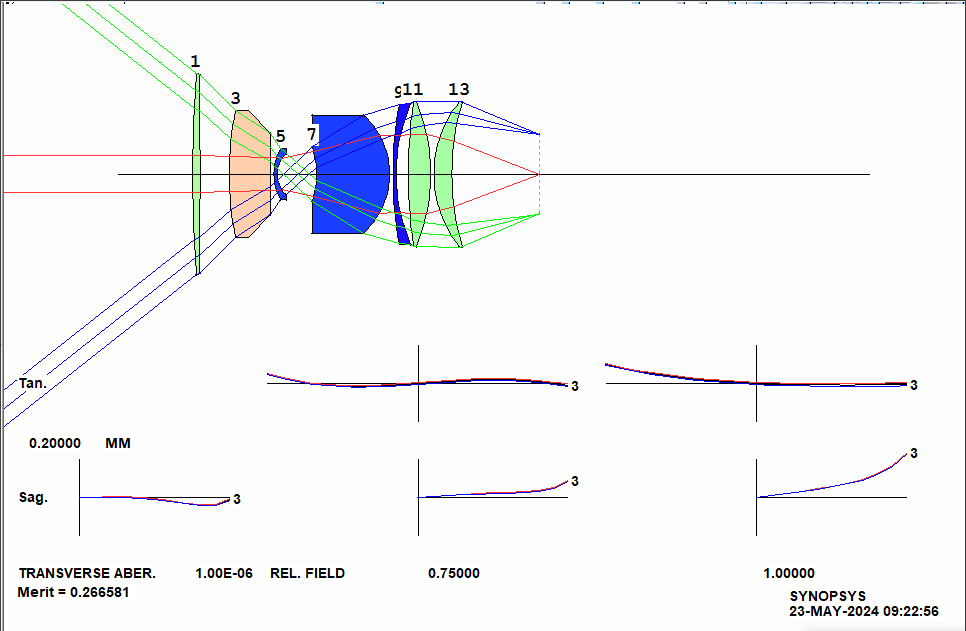
从中找出一个最佳结构,接下来进行下一步分析:
基本参数<8%
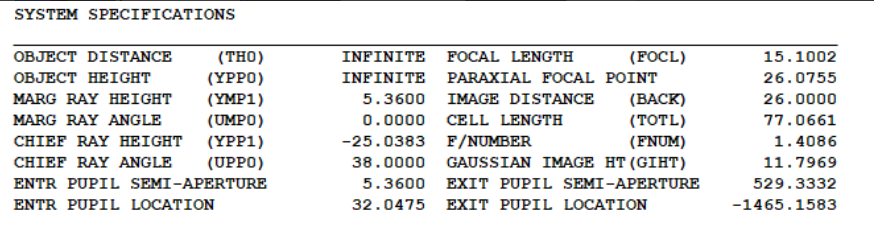
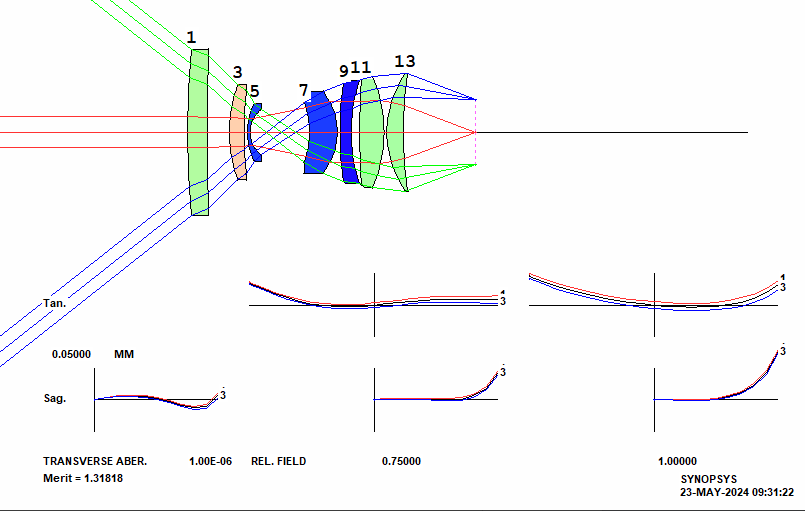
初始结构的像质
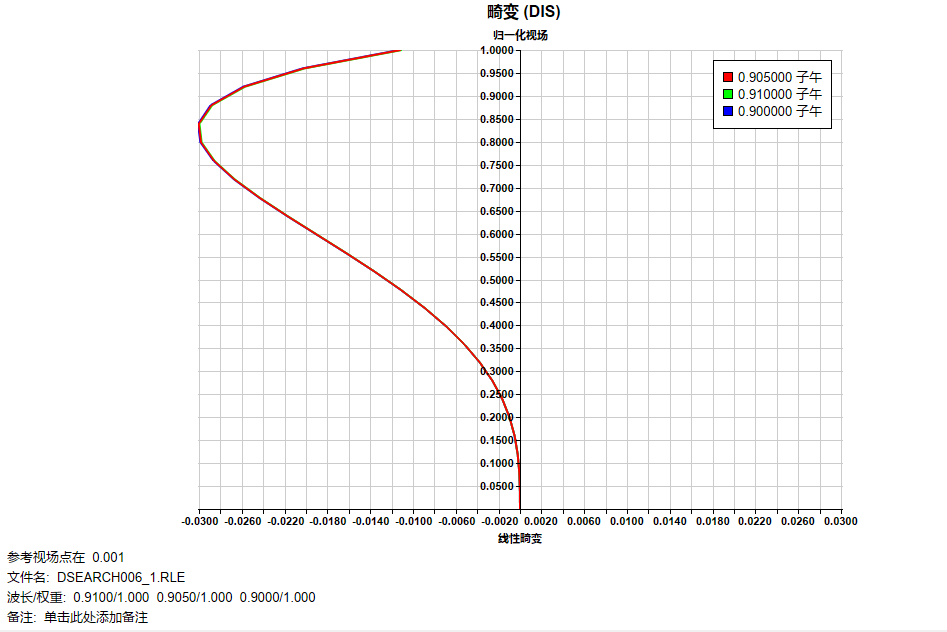
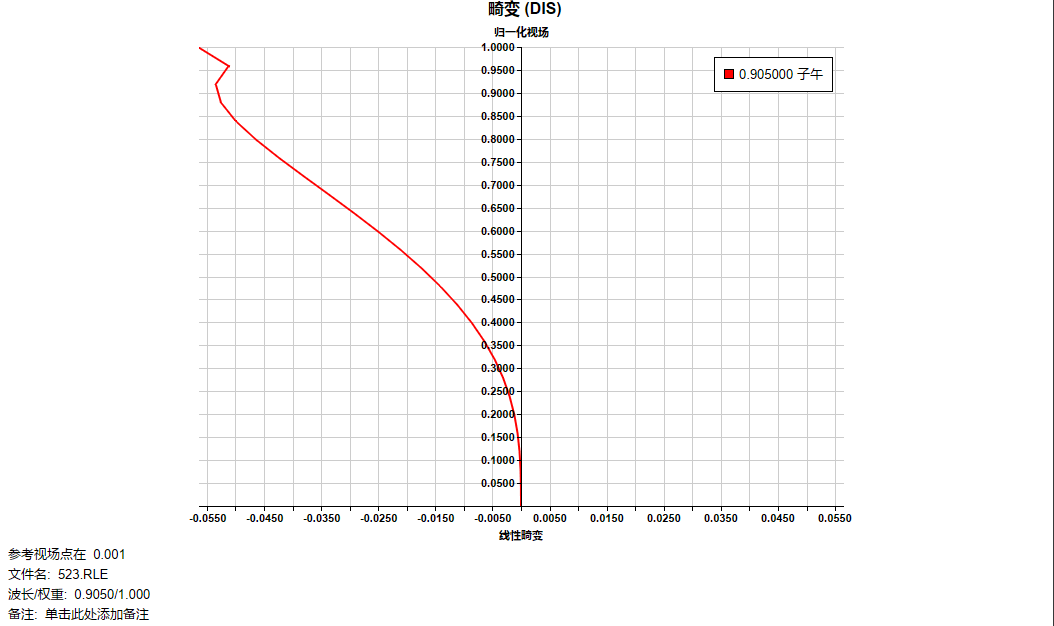
畸变
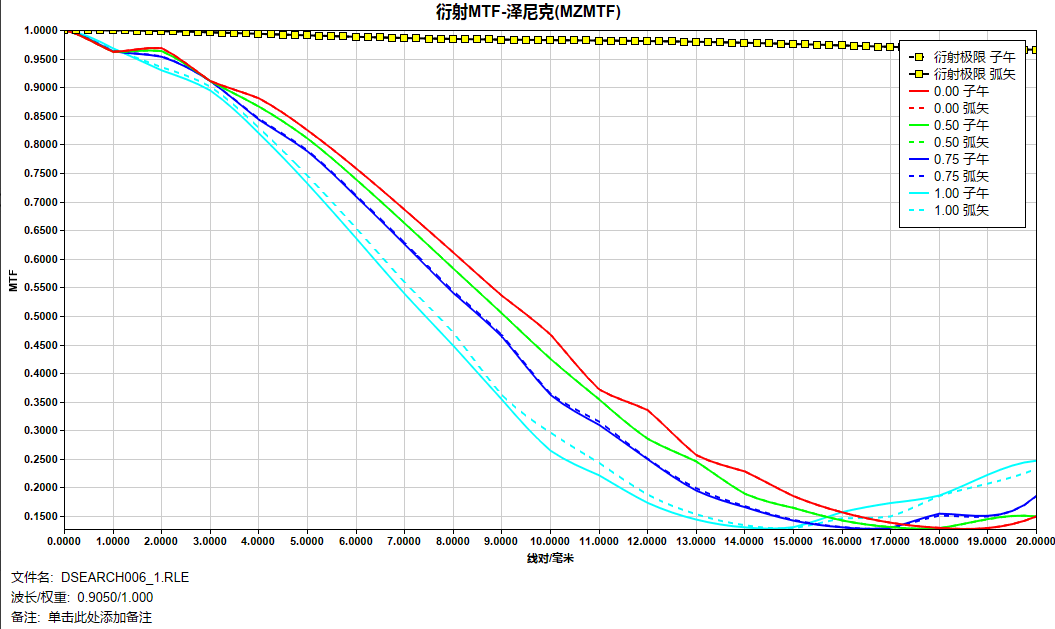
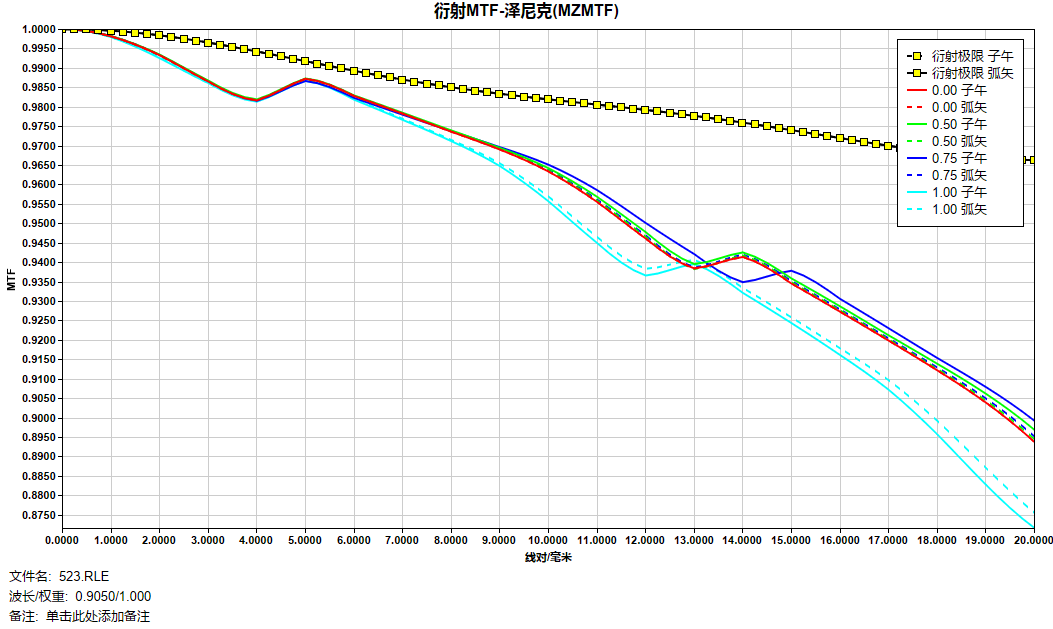
MTF
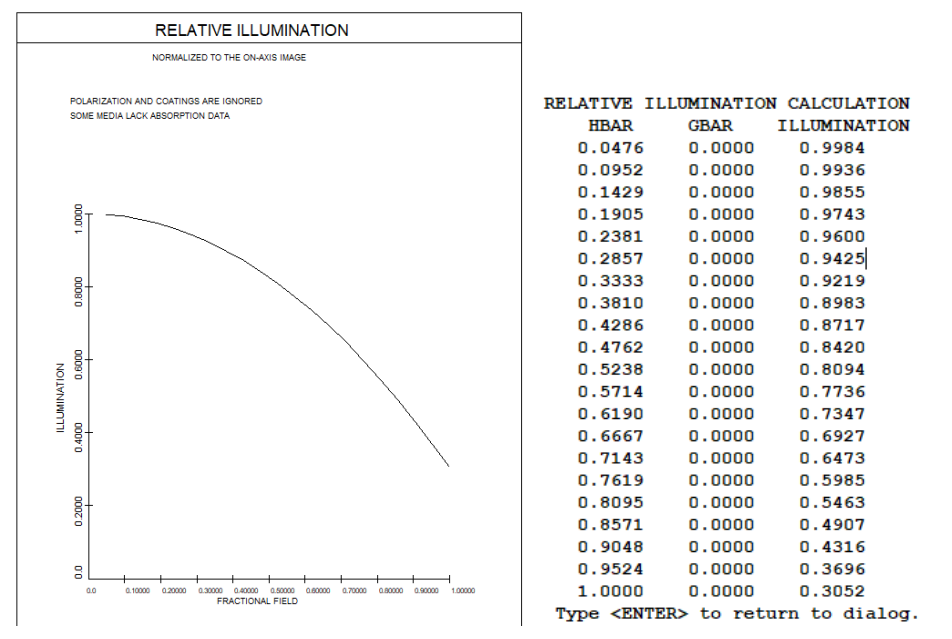
相对照度表格和图像
中间优化步骤
包含增大照度控制的权重、畸变的权重,控制厚度等等
固定光阑
在合适的位置插入光阑,使用指令固定光阑位置并模拟退火优化
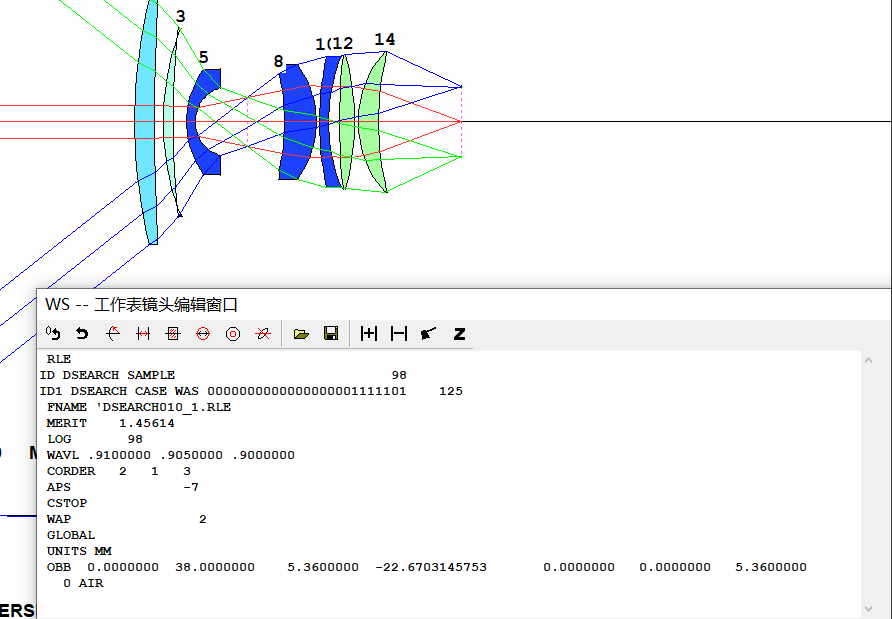
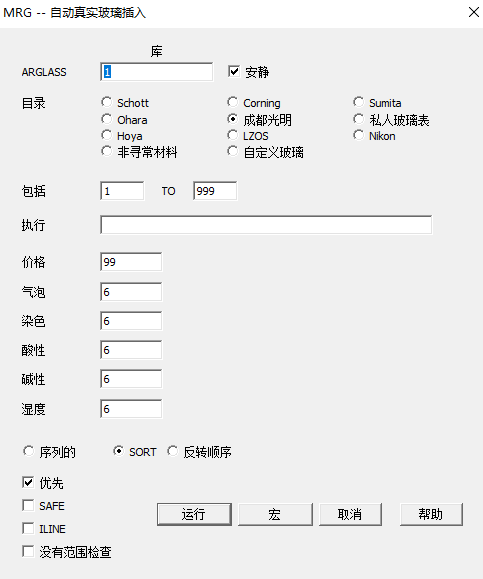
添加真实材料
优化后查看 pad 发现边缘厚度不好,太薄了加工困难,重新优化宏设置 AEC 2 1 1 ,得到结果:
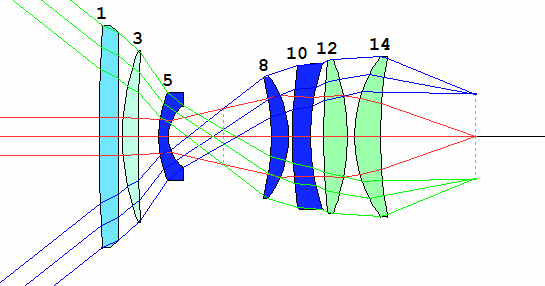
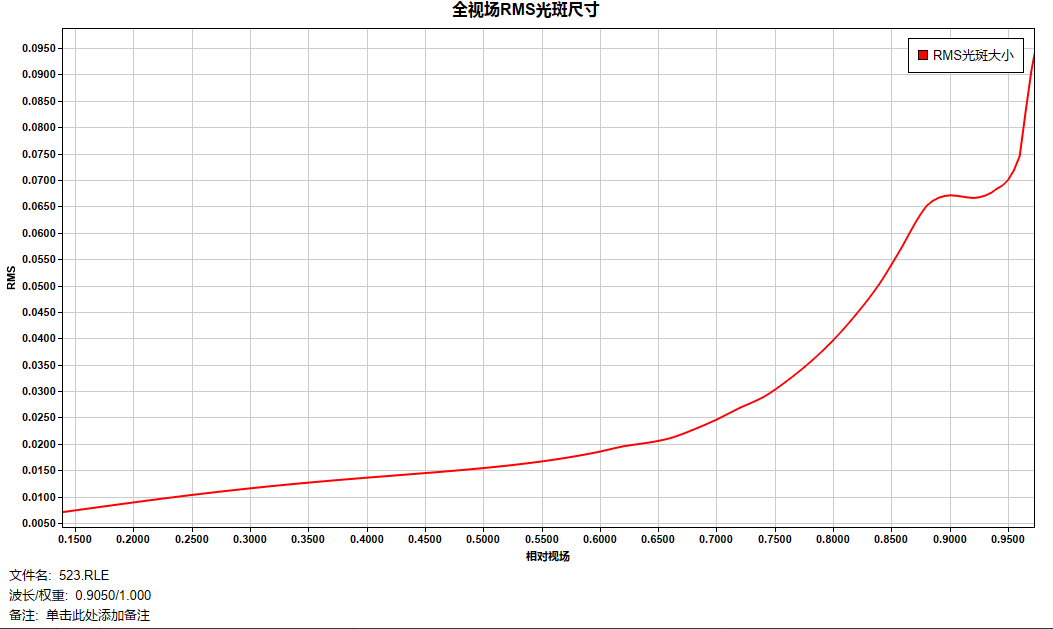
最终结果像质
优化后查看 pad 发现边缘厚度不好,太薄了加工困难,重新优化宏设置 AEC 2 1 1 ,得到结果:
畸变<8%,满足条件
MTF >0.5 全视场 20 lp/mm,满足条件
相对照度全视场>0.7且均匀,满足条件
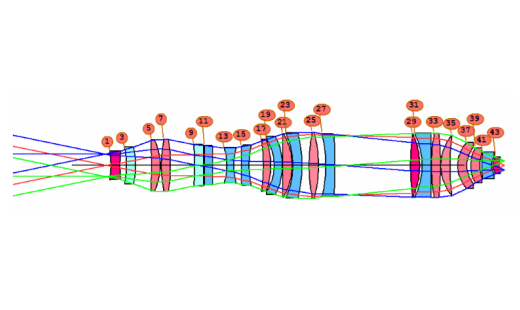
总结
该镜头所有指标已经基本满足要求,使用了7片透镜